
Le projet "NS Hope"
NS Hope (Espérance) Version 6. Image Didier Groux.
Version six ;
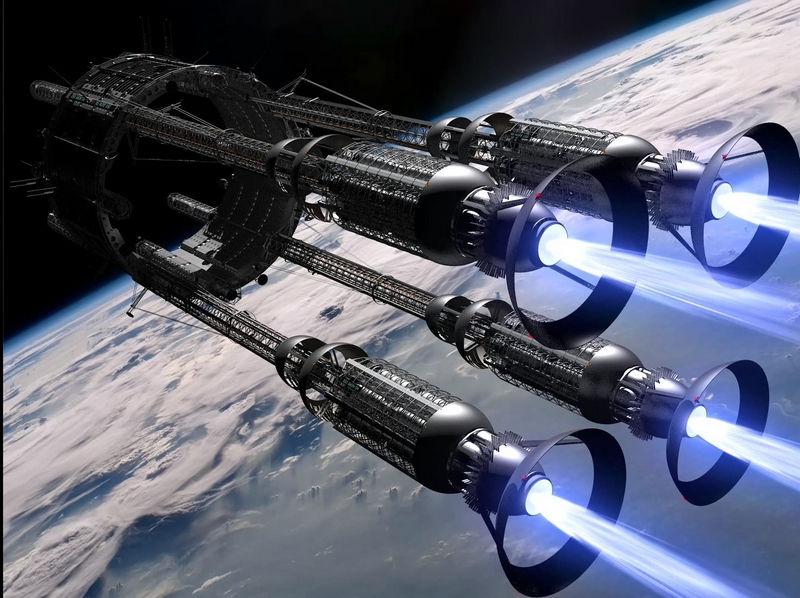
L’idée générale de la version six est une description architecturale plausible de l’ensemble des moteurs et de leurs fixations.
Si le problème architectural de l’espace de vie était devenu réalité avec ses salles, ses couloirs, il n’en était rien du reste du vaisseau. Je repris la souris avec le but de séparer la ou les parties des propulseurs pour les éloigner encore plus loin des zones de vies, de façon à pouvoir aussi le faire, si besoin, sur les versions ultérieures.
L’idée était de supprimer les boucliers, la zone avant faite d’usines, que j’intégrais à l’espace de vie et la production nucléaire fournie par les moteurs et non des centrales dédiées. Je voulais réduire le nombre de moteurs en limitant leur nombre minimum à trois. Réduire l’espace de vie me semblait nécessaire dans ce dortoir qu’est devenu « Espérance ». Pour ce faire il me suffisait d’enlever quelques modules, ainsi ce vaisseau est devenu un ensemble modulaire que j’ai complété par d’autres.
Dans la réalité, il ne semble pas impossible de former un vaisseau avec des modules de taille réduite, exception faite des gros volumes, comme les moteurs, les réservoirs, toutefois de grands volumes simples permettent un travail ultérieur et peuvent être utilisés par exemple, comme hangars.
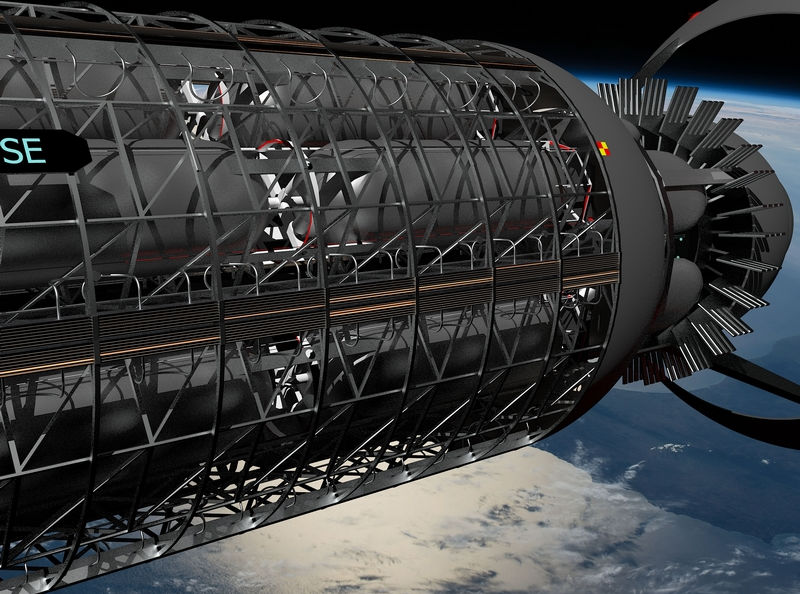
Ci-dessous un des moteurs H6 ; Image Didier Groux.
Motorisation ;
Le voyage entre les étoiles nécessite un, ou des propulseurs extrêmement puissants. En fait la technologie est imaginative et les défis à surmonter de même grandeur que la création du vivant.
Le moteur H6 est le fruit des autres versions. Dans les grandes lignes il n’est plus intégré à l’ensemble, mais éloigné le plus possible des zones de vies. Par ce fait il est devenu compact, totalement circulaire et complet au sens des différents blocs qui le compose (réservoirs, radiateurs etc.) Il peut servir à l’unité à la propulsion d’autres vaisseaux, comme on utilise les mêmes moteurs pour propulser différent véhicules.
Si pour l’illustrateur il est délicat de représenter dans le détail un moteur a antimatière, en revanche, la forme générale peut être imaginée dans ses grandes lignes. Le sous-marin « Nautilus » n’est pas si éloigné des submersibles modernes quand a son apparence.
Notes; Dans l’espace vide, l’idée pour se propulser, est de créer un fort courant au sortir des tuyères d'un moteur, courant de particule approchant la vitesse de la lumière et qui prendrai appui sur les particules déjà éjectées. Plus on éjecte vite, plus on va vite. Plus on va vite et plus on consomme d’énergie. On ne dirige pas un vaisseau spatial comme un avion ; l’air sur terre est un appui (gratuit) qui n’existe pas dans l’espace, ainsi opérer un simple virage se fait sur des millions de kilomètres, avec probablement des moteurs latéraux. Pour freiner à grande vitesse, avec un moteur fixe, il faut retourner le vaisseau (ou les moteurs rotatifs) à point nommé, ce qui nécessite une connaissance exacte du trajet. L’inversion de poussée des moteurs ne semble pas envisageable avec une propulsion nucléaire. Les déflecteurs sur le H6 ont disparus, la correction de trajectoire se fait par différence de poussée.
Baptème;
J’ai appris que le nom d’un navire se fait en deux parties, le nom propre précédé d’un code ou d’un acronyme. Ce code/acronyme varie selon le pays et le type de navire. Hope est un vaisseau spatial international (International spaceship), mais je préfère navire (Ship) et comme il est propulsé par l’utilisation de matière nucléaire (Nucléar), le voyageur interstellaire fut baptisé « NS Hope ». Hope est à comprendre par « espérance » ou « l’espérance » qui est devenu entité intelligente autonome, cette dernière précision transformant radicalement l’idée que j’avais d’un vaisseau interstellaire. L’Espérance étant surtout un support de vie je le renommais ainsi ; « LSS NS HOPE, LSS étant l’acronyme de life support system, en Français SSV ; système de support de vie.
Récapitulatif ;
Le « voyageur interstellaire Hope », dernière version (6), se décrit avec quatre gros moteurs et non huit groupés par paires. Les réservoirs sont groupés près du cœur de moteur. Les moteurs sont protégés chacun par quatre boucliers, dont deux destinés aussi à protéger l’espace de vie des radiations. La fixation au bloc d’ensemble se fait par trois tubes munis d’amortisseurs de chocs encadrés de poutres protégeant aussi trois conduits hexagonaux d’accès. L’ensemble se complète de six poutres rectangulaires de réglages externes, sur lesquels sont fixés des câbles de tensions destinés au réglage de l’ensemble (voir photos).
L’évacuation de chaleur se fait sur le corps de la chambre de fusion du réacteur et par une série de refroidisseurs répartis autour des réservoirs. Une partie de la chaleur produite est transmise à l’espace habitable par les conduits d’accès et ne provient plus d’une centrale indépendante.
L’espace habitable reste de même diamètres interne et externes que sur la version 5, mais compartimentés en dix-neuf anneaux circulaires (au lieu de vingt) La hauteur de l’ensemble passe de 310,50 à 295,50 mètres. Trois de ces anneaux sont réservés aux réservoirs d’eau et d’oxygène répartis auparavant à l’extérieur. Ces trois anneaux ne sont cloisonnés que par couloir d’accès aux réservoirs et donc ouvert sur l’espace extérieur. Le chauffage de certains réservoirs est interne. Les réservoirs sont restés éjectables, mais nécessite une poussée (faible) d’éjection.
L’espace habitable est donc à présent divisé en quatre groupes de quatre sections indépendantes. La surface totale (approximative) passe à 228 hectares (au lieu de 286). Les sections des deux bords de corps, la première et la dix-neuvième, ne sont liées aux anneaux de liaison que par sas de circulation (cas de poussée des moteurs), un système de sustentation magnétique permet la rotation. Cet ensemble formait avant le départ une station, comme dans la précédente version.
L’ensemble habitable (version six) est donc toujours indépendant du corps d’ensemble de fixation des moteurs et tourne à l’intérieur de celui-ci, ainsi il peut reprendre sa fonction première de station une fois arrivé en orbite d’Elpis.
Ci-dessous, version 6 de l'espace habitable. (Hauteur 296 mètres, diamètre 512 mètres).
Image Didier Groux.



Ci-dessus vues de la version 6.
L’architecture interne reste identique avec des espace modulable qui s’adaptent à une pesanteur rotative ou à une pesanteur de poussée des moteurs. La pesanteur des cabines de biostase se fait par rotation à l’intérieur de tores. Les cabines a une place, sont sphériques, étanches, remplies d’un liquide ou flotterons leur occupant relié par une série de tubes souples fixés à une combinaison.
Les deux cent vingt-huit hectares se divisent en quarante mille pièces environ ; cette fois le vaisseau m’échappait dans son intimité presque complètement, cependant de divisions de zones, en divisions de modules il serait possible d’avoir un aperçu de l’ensemble complet, mais répété en pièces différentes, de dimensions et volumes divers; de quelques mètres cubes aux grandes salles de départ des navettes. Le résultat serait souvent répété, mais reflète ce que serait un tel vaisseau ; une répétition d’ensembles identiques auxquels on insère d’autres ensembles plus petits.
Hormis les boucliers moteurs, ceux d’ensemble avant et arrière ont disparu. A grande vitesse ils sont inutiles et en position stationnaire d’une efficacité très réduite. Certaines structures, comme les poutres de maintiens des réservoirs offrent une protection relative en station. La protection des frottements se fait directement sur parois.
Mille-huit-cent-trente-six mètres séparent les antennes de proue à l’extrémité des moteurs, au lieu de mille-cinq-cent-cinquante, distance que l'on peut porter a plusieurs kilomètres.
L’image interne à présent est un lieu bercé par le son de l’air pulsé, troublé par le le va-et-vient de quelques robots qui communiquent par ondes radio et radar. Ces robots n’ont pas besoin d’air « biologique » pour vivre et donc bon nombre de salles n’en sont plus pourvues. Éclairer un lieu se résume à l’entretien de la vie si cela est nécessaire. Le cloisonnement inter salle ne se justifie que pour diminuer l’impact d’une dépressurisation, ainsi certaines salles n’ont que des portes légères, les cloisonnements sont fins et légers, ce qui permet aussi de les déplacer pour former des espaces différents, leur résistance thermique est élevée. Des ascenseurs parcourent le vaisseau, mais des couloirs permettent un accès routier ou pédestre.
Le poids total d’un tel vaisseau est surhaussé des marchandises qu’il devrait pouvoir débarquer et cela avec des moyens fiables qui sont une flotte de navettes plus ou moins importante. Ces engins sont alourdis par le fait qu’ils doivent traverser une atmosphère et donc être résistant aux hautes températures. J’ai tenté une évaluation très approximative ; Hope c’est 740000 tonnes en charge, 550000 tonnes a vide. Je ne suis arrivé qu’à 11000 tonnes de fret débarqué. Une partie des navettes (80) est récupérable ou utilisable, ici peut-être 3000 tonnes. Un vaisseau au long cours devra débarquer un maximum de fret, ainsi sa conception même s’en trouve modifiée avec un nombre de navettes important a abriter ou non en soutes, a moins qu’elle soit réutilisable et donc munies de moteurs très puissants ou portée par un avion relativement puissant à construire sur place.
Vingt-et-unième siècle, la réalité dépasse la fiction ou sont plongées nos certitudes de savoir ;
Conformément à ce que je tentais de me représenter, je me documentais et à nouveau la visualisation d’un tel vaisseau s’éloigna.
Les découvertes, les technologies avancent, on arrive par exemple à faire manipuler un bras robotique de par la seule activité cérébrale d’une personne. Les mains articulées existent et leur coût ne cesse de diminuer. Les premiers robots à apparence humaine arrivent à se déplacer. J’en vins à créer mon premier robot, du moins en apparence ; le Boop.
Ci-dessous Boops au transport, utilisation personnelle de Rosa. Image Didier Groux.

En ce début de siècle, une autre idée refait surface avec la possibilité du développement de l’intelligence artificielle ; le mythe de Frankenstein.
Au début mon « Boop » était un simple robot commandé, puis je l’ai doté de bras-trompe et mains, pour œuvrer en toute indépendance. Sa panoplie d’outils fait qu’il se déplace à bord d’un vaisseau spatial, mais aussi sur terrain solide ou liquide en changeant lui-même ses roues plus large sur un sol et dotés d’ailettes pour se déplacer sur un liquide.
Sans m’en apercevoir je dotais le petit véhicule d’une intelligence en désirant qu’il change lui-même ses roues s’il en éprouve le besoin, selon la configuration du terrain par exemple.
Pourquoi ne pas étendre ces caractères a un vaisseau spatial aussi complexe que le « Hope » ? Dès lors je renonçais a l’image du vaisseau inerte commandé par des humains, l’entité « Hope » était née.
Cette structures pour le coup, se barde de capteurs et interagit directement avec les humains et elle à une voix.
Au début du vingt-troisième siècle on peut imaginer parfaite symbiose entre une intelligence artificielle, objets intelligents et humains.
L’idée que j’avais à présent de l’entité « Espérance » m’obligea à repenser l’architecture interne, ainsi le lien mécanique avec la machine, tend à disparaitre au profit de commandes vocales et neuronales; sur le dessin la passerelle de commande générale n'a plus de raison d'être.
Hope étant une entité intelligente, reste à en définir les limites. Ne pourrait-il pas être vivant ? Cette idée nouvelle pour moi, me sembla assez irréelle, puis à force de temps s’imposa et me plongea dans une perplexité croissante pour ce qu’il en sera de la représentation physique « d’Espérance ».
Je me lançais d’abord dans la construction de petits engins spatiaux qui pourraient me guider car je les imaginais déjà avec pattes et bras articulés.
Ci-dessous quadripode « explorer » mené par Keiko assisté de John ; Image Didier Groux.


Ci-dessus un quadripode « explorer ». Image Didier Groux.
Les « explorers » ;
J’avais en tête de créer des véhicules spatiaux ou terrestres avec une base mécanique très classique et surtout très terrestre. L’espace est pourtant un lieu sans pesanteur, surtout pour de petits engins. Je reportais une construction spatiale à plus tard, car j’avais sur l’écran ce qui pourrait devenir un bon engin de découverte planétaire. Pourquoi ne pas transformer la version spatiale par trop terrestre, par une version de type terrestre en modifiant les pieds par exemple. Je tentais la locomotion ce qui me força à diviser par blocs les pattes allant à la division telle quelle existe dans la nature (mains, bras, pieds etc,) Mon but était de représenter un « explorer » en train de marcher. Malheureusement les pattes que j’avais conçues ne permettaient que d’élever ou abaisser un ensemble, mais certainement pas la marche.
Avec deux pattes de plus mon hexapode ne se déplaçait toujours que de haut en bas. Pour qu’il paraisse fiable je dus le pourvoir de rotules et d’amortisseurs.
Je dus déchanter à la vue d’une araignée capturée (et relâchée) pour l’occasion ; le spectacle de ce petit insecte au déplacement rapide est stupéfiant ! Les insectes n’ont pas de rotules, des os externes forment une carapace, ainsi la solution articulé est le pliage. L’amortissement se fait en souplesse par divisions de pliages et donc crée des membres très long et fins. Je me suis contenté d’allonger les pattes de mon robot en pensant être loin du résultat qui le ferait courir aussi vélocement qu’une araignée !
Ci-dessous un hexapode « explorer » debout puis posé. Images Didier Groux.



